Bezkontakta induktivitātes sensors ir novietots kā sensors, kas spēj reaģēt uz metāla priekšmetiem, kas noķerti tā elektromagnētiskajā laukā. Sakarā ar šo induktīvo tuvuma sensoru īpašību ir iespējams izsekot aprīkojuma kustīgo daļu kustībai un, ja nepieciešams, izslēgt piedziņas mehānisma motoru. Magnētiskā lauka izmaiņu atpazīšanai un analīzei to sastāvā tiek ieviesta īpaša elektroniska vienība, ko sauc par kontrolieri (salīdzinātāju).
Ierīce un darbības princips

Indukcijas stāvokļa sensori papildus elektroniskajam salīdzināmajam satur šādus nepieciešamos komponentus:
- tērauda korpuss ar savienotāju savienojuma vadam;
- iebūvētais jutīgais elements, kas uztver izmaiņas magnētiskajā laukā, tiek izgatavots tērauda serdeņa formā ar spoli;
- izpildvaras releja modulis;
- ieslēgšanas indikators uz gaismas diodes.
Dažādu metāla sensoru modeļu dizainparaugiem var būt dažas atšķirības. Tie neietekmē pašu indukcijas sensoru, tā darbības princips no tā nemainās.
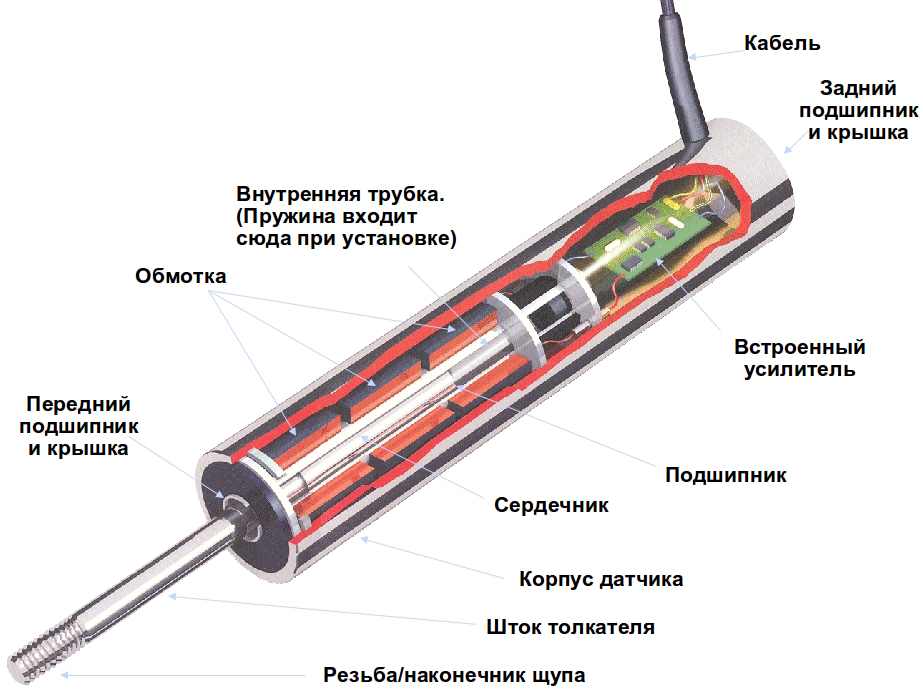
Saskaņā ar ierīces ierīci tā darbības būtība ir aprakstīta šādi:
- vadāmā objekta metāla daļas kustība noved pie sensora elementa induktivitātes izmaiņām;
- novirze ir izskaidrojama ar tā magnētiskā lauka kropļojumiem, kuru sekas ir elektriskās ķēdes parametru maiņa un tā aktivizācija (iedegas gaismas diode);
- pēc tam elektroniskais modulis tiek aktivizēts un nosūta signālu pievadam;
- saņemot impulsu par kustību, kas pārsniedz pieļaujamo robežu, izejas (releja) mezgls atvieno kontrolēto aprīkojumu no tīkla.
Katram modelim ir savs jutības pret pārvietojumu indikators - pārvietojuma sprauga. Dažādiem paraugiem šis parametrs svārstās no 1 mikrona līdz 20 milimetriem.
Induktīvie sensora parametri

Papildus reakcijas diapazonam vai jutīgumam induktīvo sensoru raksturo šādi darbības rādītāji:
- Dažādu paraugu stiprinājuma vītnes izmērs (diametrs) ir no 8 līdz 30 mm.
- Nominālais barošanas spriegums temperatūrā plus 20 grādi, līdz 90 voltiem līdzstrāvas un līdz 230 voltiem - maiņstrāvas.
- Korpusa kopējais garums - tā vērtība ir atkarīga no darba sprieguma.
Pēdējais rādītājs dažādiem paraugiem var ievērojami atšķirties.
Ierīces jutīgajai vai aktīvajai zonai tiek ieviests vēl viens parametrs, ko sauc par garantēto atbildes robežu. Tā apakšējā robeža ir nulle, bet augšējā - 80 procenti no nominālās vērtības. Šo rādītāju dažreiz sauc par darba spraugas korekcijas koeficientu.
Tikpat svarīgs jutīgas ierīces funkcionalitātes rādītājs ir savienotāju vadu skaits savienotājā. Parasti ir divi vai trīs: divi barošanas avoti un viens, lai aktivizētu ķēdi. Tomēr ir iespējamas savienojuma iespējas, kuru izkārtojumā tiek izmantoti četri vai pieci kontaktpunkti. Šādi paraugi, izņemot divus padeves vadītājus, satur divas slodzes izejas. Šajā gadījumā piektais diriģents tiek izmantots, lai izvēlētos pašas ierīces darbības režīmu.
Izejas veidi un savienojuma metodes
Lai novērtētu jutīgas ierīces darbību, tiek ieviests īpašs raksturlielums, kuru novērtē pēc tā izejas parametru polaritātes stāvokļa. Saskaņā ar vispārpieņemto pusvadītāju elementu (tranzistoru) apzīmējumu, kas iekļauts sensora elektroniskajā shēmā, šīs izejas tiek sauktas par "PNP" un "NPN".
Atšķirība starp šiem elementiem ir tāda, ka tie apzīmē jutīgu ierīču barošanas avotu dažādas polaritātes (polus). PNP tranzistori pārslēdz tā pozitīvo izlaidi, un NPN - negatīvo. Izejas ķēžu slodze visbiežāk ir vadības mikroprocesors.
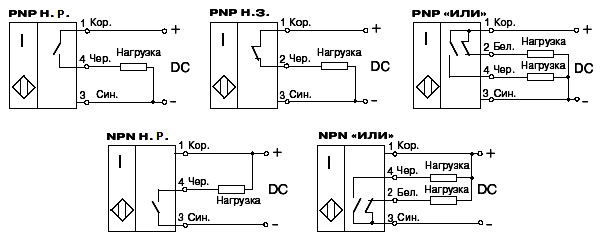
Atkarībā no kontroliera vadības shēmas, induktīvos sensorus apzīmē kā HO (parasti atvērtus) vai HZ - ar parasti slēgtu ieeju.
Opcija ar NPN tranzistoru ir visizplatītākais sensora ieslēgšanas veids, jo saskaņā ar standarta shēmas risinājumiem negatīvais vads tiek veikts visiem komponentiem. Šajā gadījumā mikroprocesoru un citu vadības ierīču ieejas tiek aktivizētas ar pozitīvu spriegumu.
Savienojuma marķējums
Principā induktīvos sensorus parasti apzīmē kā rombu vai kvadrātu, kura iekšpusē ir divas vertikālas līnijas. Bieži vien tie norāda arī izejas veidu (parasti atvērtu vai slēgtu), kas atbilst vienai no pusvadītāju tranzistoru šķirnēm. Lielākā daļa ķēžu konstrukciju norāda parasti slēgtu grupu vai abas tajā pašā kamerā.
Tapu krāsa

Praksē induktivitātes sensoru spaiļu marķēšanai tiek izmantota standarta sistēma, kuru bez izņēmuma ievēro visi jutīgo ierīču ražotāji. Tomēr pirms to uzstādīšanas ieteicams rūpīgi uzraudzīt savienojuma polaritāti un noteikti izlasīt instrukcijas, kas pievienotas izstrādājumiem.
Visu sensoru gadījumos ir rasējums ar vadu krāsu marķējumu, ja tā izmēri to atļauj.
Standarta apzīmējums:
- Zils vienmēr nozīmē negatīvā spēka sliedi;
- brūns (brūns) apzīmē pozitīvu vadītāju;
- melns (melns) atbilst sensora izejai;
- Balta krāsa ir papildu izeja vai ievade.
Lai precizētu pēdējo marķējumu, tas jāpārbauda, izmantojot norādījumus, kas pievienoti konkrētajai ierīcei.
Sensora kļūdas

Kļūda, nolasot vadības sistēmu, būtiski ietekmē tuvuma sensora darbību. Tā kopējā vērtība tiek savākta no dažādu rādītāju individuālām mērījumu kļūdām: elektromagnētiskajiem, temperatūras, aparatūras, magnētiskās elastības un daudziem citiem.
Elektromagnētiskā kļūda tiek definēta kā nejauši radies lielums. Tas parādās viltus EML dēļ, ko spolē izraisa ārējie magnētiskie lauki. Ražošanas apstākļos šo komponentu rada barošanas iekārtas ar darbības frekvenci 50 Hz. Temperatūras kļūda ir viens no vissvarīgākajiem rādītājiem, jo vairums sensoru var darboties tikai noteiktā temperatūras diapazonā. Projektējot šīs klases ierīces, tas ir jāņem vērā.
Magnētiskās elastības kļūda tiek ieviesta kā kodolu deformāciju nestabilitātes indikators, kas rodas ierīces montāžas laikā, kā arī tas pats faktors, bet izpaužas tās darbības laikā. Iekšējo spriegumu nestabilitāte magnētiskajā ķēdē noved pie kļūdām izejas signāla apstrādē. Kļūda, kas rodas visjutīgākajā ierīcē, izpaužas lauka struktūras ietekmes dēļ uz sensora metāla elementu deformācijas koeficientu. Turklāt tā kopējo vērtību ievērojami ietekmē atstarpe un spraugas struktūras kustīgajās daļās.
Savienotājkabeļa kļūda tiek apkopota no tā vadu vadītāju pretestības vērtības novirzēm atkarībā no temperatūras koeficienta, kā arī no svešu elektromagnētisko lauku un EML traucējumiem. Deformācijas mērītāja kļūda kā nejaušs mainīgais ir atkarīgs no sensora tinuma elementu (jo īpaši tā spoles) ražošanas kvalitātes. Dažādos darba apstākļos ir iespējams mainīt tinumu pretestību ar līdzstrāvu, kas noved pie izejas signāla "peldēšanas". Novecošanās kļūda izpaužas sensora kustīgo elementu nodiluma dēļ, kā arī mainoties magnētiskās ķēdes elektromagnētiskajām īpašībām.
Šī parametra patieso vērtību ir iespējams pārbaudīt tikai ar īpaši precīzu mērinstrumentu palīdzību. Šajā gadījumā ir jāņem vērā paša sensora kinemātiskās īpašības. Projektējot un izgatavojot jutīgus elementus, šī iespēja jau iepriekš tiek ņemta vērā, izstrādājot dizainu.
Induktīvos un kapacitatīvos sensorus raksturo darbības režīmi ar daudziem ietekmes faktoriem, ko nosaka specifiski darbības apstākļi. Tāpēc jutībai un izejas parametru kopumam, kas piemērots konkrētam ierīces zīmolam, ir izšķiroša nozīme, ja to izmanto kā ierobežojošo slēdzi.